1.3 Согласование скоростей
Объединение цифровых потоков
происходит при формировании группового цифрового сигнала из цифровых потоков
систем более низкого порядка, а также при объединении различных сигналов,
передаваемых в цифровом виде, в единый цифровой
поток.
Объединение цифровых потоков
происходит при формировании группового цифрового сигнала из цифровых потоков
систем более низкого порядка, а также при объединении различных сигналов,
передаваемых в цифровом виде, в единый цифровой поток.
При формировании группового цифрового
сигнала возможны следующие способы объединения цифровых потоков: посимвольный
(поразрядный); поканальный (по кодовым группам каналов)
и посистемный (по
циклам потоков объединяемых систем). На рисунке. 1.5. (а) показан принцип
посимвольного, а на рис. 1.5. (б) поканального объединения цифровых потоков. В
обоих случаях объединяются четыре потока.
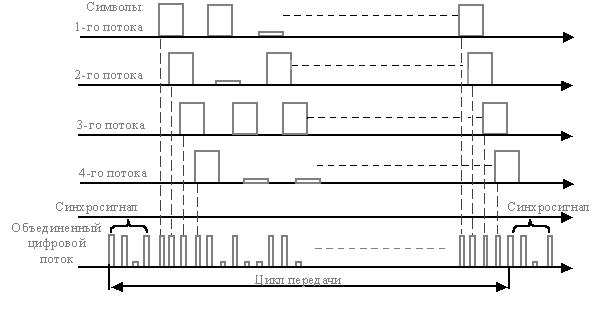
а) Рис. 1.5. Формирование группового
цифрового сигнала с посимвольным способом объединения цифровых
потоков.
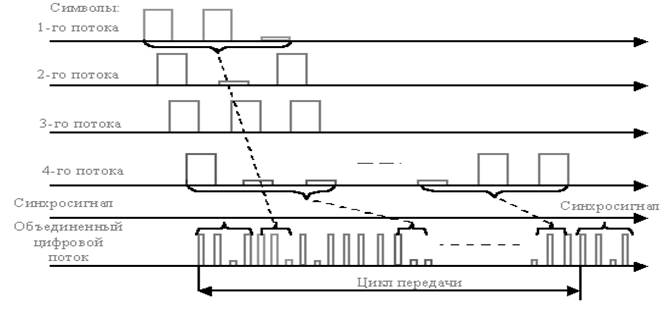
б) Рис. 1.5. Формирование группового цифрового сигнала с поканальным способом объединения цифровых потоков.
При посимвольном объединении импульсы
цифровых сигналов объединяемых систем укорачиваются и распределяются во времени
так, чтобы в освободившихся интервалах могли разместиться вводимые импульсы
других систем. При поканальном объединении цифровых потоков
сужаются и распределяются во времени интервалы, отводимые для кодовых групп.
Сигналы цикловой синхронизации необходимы для правильного распределения цифровых
потоков на приемном конце. Объединение цифровых потоков по циклам
аналогично поканальному объединению, только
обрабатывается (сжимается) во времени и передается целиком цикл одного цифрового
потока, а потом следующих. Наиболее простым и широко применяемым способом
является способ посимвольного объединения, который и будет рассмотрен
подробней.
Объединение цифровых потоков
осуществляется в оборудовании временного группообразования, с принципом
построения которого вы можете ознакомиться на рис. 1.6.
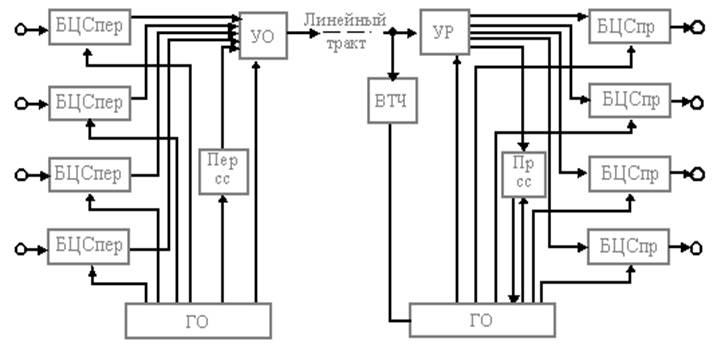
Рис. 1.6. Принцип построения оборудования временного группообразования.
В состав оборудования входят: блоки
цифрового сопряжения тракта передачи и приема БЦСпер, БЦСпр; устройства
объединения УО в тракте передачи и разделения УР в тракте приема потоков;
передатчик и приемник синхросигнала Пер. СС, Пр. СС; выделитель тактовой
частоты ВТЧ линейного цифрового сигнала; генераторное оборудование ГО передающей
и приемной станции.
Сигналы с выходов БЦСпер, совместно с
сигналами цикловой синхронизации поступают на вход схемы объединения. Временной
сдвиг между импульсными последовательностями на выходах БЦСпер, обеспечивается
управляющими импульсами с ГО. На приеме УР распределяет импульсы группового
сигнала по своим БЦСпр, а также сигналы Пр. СС.
Генераторное оборудование систем
передачи более низкого порядка может работать либо независимо от оборудования
объединения и разделения цифровых потоков, либо должна обеспечиваться
синхронизация общим задающим генератором. В зависимости от этого объединения
цифровых потоков будет асинхронным или синхронным.
При синхронном объединении цифровых
потоков скорость записи в БЦС и скорость считывания этой информации из БЦС будут
постоянными и кратными, так как
вырабатываются одним и тем же ГО. В данном случае между командами записи и
считывания должен быть, установлен требуемый временной сдвиг, чтобы считывание
информации происходило после ее поступления в БЦСпер.
При асинхронном объединении цифровых
потоков, когда ГО устройств объединения цифровых потоков и ГО устройств
формирование цифровых потоков низшего порядка работают независимо, возможно
некоторое расхождение между скоростями записи и считывания. Для согласования
этих скоростей необходимо принимать соответствующие меры.
При объединении
цифровых потоков производится запись информационных символов в запоминающее
устройство ЗУ с частотой fз и последующее их считывание с
частотой fсч. При синхронном
объединении цифровых потоков fз = fсч. При асинхронном объединении цифровых потоков частоты
записи и считывания могут изменяться в некоторых пределах и иметь
значения
fз. – ∆fз.max  fз ≤ fз. + ∆ fз max ;
fз ≤ fз. + ∆ fз max ;
fсч. –
∆ fсч. max ≤ fсч. fсч. + ∆ fсч. max,
где fз., fсч. – номинальные значения частоты записи и считывания
информационных символов; ∆ fз max,
∆ fсч max – максимальное отклонение частот
записи считывания от номинального значения, вызванное нестабильностью работы
ГО.
При таких ситуациях могут возникнуть
моменты, когда fз > fсч. и память ЗУ будет заполнена или
когда fз < fсч. и память ЗУ будет пуста и в очередной момент считывать
будет нечего. В обеих ситуациях передача цифрового потока будет происходить с
искажениями, так как в первом случае часть информационных символов пропадает, а
во втором – появляются дополнительные временные позиции, которые в исходном
цифровом потоке отсутствуют. Чтобы избежать этих нарушений, требуется обеспечить
согласование скоростей.
При fз < fсч. производится положительное выравнивание скоростей: в
считанную последовательность вводится дополнительный балластный тактовый
интервал, который на приеме должен быть изъят из передаваемой последовательности
информационных символов. Если fз > fсч., производится отрицательное согласование скоростей; из
считываемой последовательности изымается один тактовый интервал, информация
которого передается по специальному временному каналу и на приеме вводится в
передаваемый поток на свое место.
При асинхронном объединении цифровых
потоков находят применения системы как с односторонним, так и
двустороннем согласованием скоростей.
В системах с
односторонним согласованием скоростей частота fсч. выбирается заведомо большей или меньшей,
чем fз (в
зависимости от положительного или отрицательного согласования
скоростей). При этом в
системах с положительным согласованием скоростей должно выполняться
условие:
fсч. – ∆ fсч. max > fз. + ∆ fз max
Тогда при согласовании скоростей в
считанную последовательность вводится дополнительный информационный (балластный)
тактовый интервал (запретом одного импульса считывания), который на приеме
исключается из нее по соответствующей команде согласования
скоростей.
В системах с отрицательным
согласованием скоростей должно выполняться условие:
fсч. + ∆ fсч. max < fз. – ∆ fз max .
Тогда при согласовании скоростей в
этих системах на передаче из информационной последовательности изымается один
тактовый интервал (дополнительное считывание), который передается по
дополнительному каналу и на приеме на команде согласования скоростей снова
вводится в информационную последовательность.
В системах с двусторонним
согласованием скоростей частота fсч.
выбирается равной fз. При
этом должно выполняться условие:
fсч. ± ∆ fсч. max = fз.н ±
∆ fз max .
В зависимости от знака разности
частот fз и fсч. при возникновении неоднородности необходимо либо
вводить считанную последовательность дополнительный тактовый интервал, либо
изымать его и передавать по дополнительному каналу.
В реальной аппаратуре объединение
потоков необходимо передавать еще служебные сигналы (цикловую синхрокомбинацию, команды
согласования скоростей, импульсы служебной связи, аварийные сигналы и др.),
поэтому частота считывания выбирается больше частоты
записи:
fсч = fсч. + fсл,
где fсл – частота следования служебных импульсов. Таким образом , из-за расхождения частот записи и считывания цифровых потоков периоды между моментами записи и считывания будут отличаться на величину
∆t = Tз – Tсч,
где Tз = 1/ fз – период записи
информационных символов;
Tсч = 1/ fсч – период их
считывания.
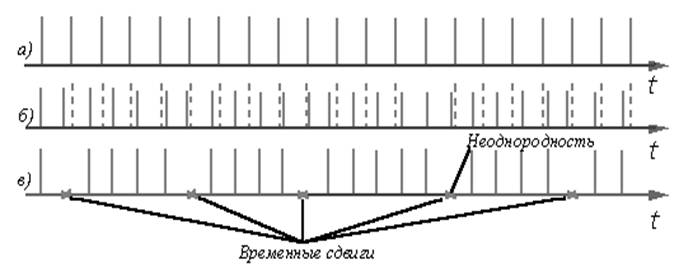
Рис. 1.7.Временные
диаграммы, поясняющие принцип возникновения временных сдвигов и
неоднородностей:
а) импульсные последовательности
записи;
б) то же,
считывания;
в) последовательность считанных импульсов.
Для упрощения реальный сигнал от
источника информации, состоящий из 1 и 0, заменен сигналом, состоящим только из
1. При ∆ t = 0, когда fз = fсч или Tз – Tсч = 0, считанная из ЗУ
последовательность будет такой же. На рисунке 9.3 (б), показана
последовательность считываемых импульсов, для которых fсч > fз ( ∆t >0), с конкретным значением
отношения Тсч/Тз= 13/16. Как видно из рисунка, импульсы
считывания опережают записанные импульсы и
через некоторое время наступит момент, когда ячейки
памяти будут свободны от информационных импульсов и появятся нулевые символы,
которые называются временными сдвигами рисунок 9.2 (в). Интервалы времени между
такими символами в последовательности считанных импульсов определяют период
временных сдвигов.
Число информационных импульсов между
соседними временными сдвигами будет R = П [Тсч/ (Тз – Тсч)]
где символ П означает округление до ближайшего целого.
При синхронном объединении потоков отношение Тсч/(Тз – Тсч) есть целое число. Например, при Тсч/Тз = 12/16
символ П= 3, т.е. временной сдвиг
будет после каждых трех позиций передачи информации. Тогда в считанной
последовательности импульсов интервалы между временными сдвигами будут
постоянными. Такую последовательность импульсов называют однородной, так как
временные сдвиги формируются на строго определенных позициях в цикле передачи и
могут использоваться для передачи служебных сигналов. Частота следования последних постоянна, что позволяет выделить их на
приеме. При асинхронном объединении цифровых потоков
из-за нестабильности сдающих генераторов, вырабатывающих тактовые частоты,
отношение Тсч/ (Тз – Тсч) – дробное число и его величина будет меняться во
времени. В этом случае (рис 9.3 (в)) через определенное число временных сдвигов
число импульсов между соседними временными сдвигами изменяется и появляется
неоднородность.
Период возникновения подобных
неоднородностей определяются разностью:
[Тсч/
(Тз – Тсч)] – П [Тсч/ (Тз – Тсч)] = ±1/t,
где t – число временных сдвигов в
цикле неоднородности.
Для приведенного выше
примера Тсч/Тз = 13/16.
При этом [Тсч/ (Тз – Тсч)] – П [Тсч/ (Тз – Тсч)] = 13/3 - 4 = 1/3, следовательно, в данном случае
неоднородности возникают в каждом третьем временном сдвиге и в интервале между
временным сдвигом будет не четыре, а пять считанных импульсов. В дальнейшем цикл
временных сдвигов повториться. При появлении неоднородностей требуется
обеспечить согласование скоростей передачи символов путем коррекции
соответствующих моментов временных сдвигов. В рассмотренном случае можно
уменьшить соотношение между частотами записи и считывания до 12/15. При этом
временные сдвиги будут появляться после четырех считанных импульсов, но каждый
13-ый импульс последовательности записи должен изыматься и передаваться по
отдельному каналу (производится отрицательное согласование скоростей). Если,
наоборот, соотношение между частотами записи считывания увеличить до 15/18, то
интервалы между временными сдвигами, содержащие четыре считанных импульса надо
увеличивать до пяти, вводя тактовые интервалы (производится положительное
согласование скоростей).
Для передачи команд согласования
скоростей информационного символа при отрицательном согласовании скоростей
организуются дополнительные временные каналы на определенных позициях цикла
передачи. Следовательно, согласование скоростей может производиться в строго
определенный момент, обусловленный структурой цикла передачи объединенного
цифрового потока. Передача КСС приводит к снижению эффективности работы системы
передачи, так как необходимо повышать тактовую частоту передачи или уменьшать
объем передачи полезной информации. Число КСС, а следовательно, и объем дополнительной
информации будут зависеть от частоты возникновения неоднородности, которая в
основном зависит от стабильности работы генераторного оборудования. Учитывая
достаточно высокую стабильность ГО, передаваемые команды согласования скоростей
занимают 1-2 % объема передаваемой информации.
Контрольные
вопросы.
1.Какие способы объединения цифровых
потоков возможны при формировании группового цифрового
сигнала?
2.Для чего предназначено оборудование
временного группообразования?
3.Какие блоки входят в состав
оборудования временного группообразования?
4.Что будет
если fз > fсч и fз < fсч?
5.В каких случаях производится положительное и отрицательное выравнивание скоростей?
|
|